Luku 4 — Apuikkunat
Pääikkunan (3D-näkymä ja Tarkastaja) lisäksi RadianceKit hallinnoi seitsemää muuta ikkunaa, jotka kaikki avataan Help-valikosta. Luettelo ylhäältä alas: User Guide (⌘?), Keyboard Shortcuts (⌘/), Open Training Logs… (ei avaa sovellusikkunaa, vaan Finderin; siksi sitä ei käsitellä tässä tarkemmin), Manage Storage…, Pareto Dashboard… (⇧⌘D), Holdout Analysis… (⇧⌘H), BayesOpt Console… (⇧⌘B). Kolme näistä – Dashboard, Holdout, BayesOpt – ovat itsenäisiä analyysityökaluja. Niillä on kullakin oma View-Model-pino, ne lukevat tai kirjoittavat JSON-tiedostoja levylle, ja jokaiselle on olemassa CLI-argumentti, jolla voit ohjata ikkunan tiettyyn tiedostoon heti sovelluksen käynnistyessä (–dashboard-dir, –holdout-file, –bayesopt-autorun).
Neljä yksinkertaista ikkunaa (User Guide, Keyboard Shortcuts, Manage Storage sekä alivalikkokohdat Open Training Logs / Open Exports Folder) saavat lyhyen kuvauksen kutakin ohjainta kohden. Kolme analyysi-ikkunaa on dokumentoitu yksityiskohtaisemmin – jokaisella on johdanto, joka selittää, mitä ikkunassa näkyy, milloin se kannattaa avata ja miten näytettävää kuvaa tulkitaan.
Luvun lopussa on viittausosio pääikkunan Tarkastajaan: mitä voit hyödyllisesti lukea Live-Loss-kaaviosta ja Gaussian-Count-näytöstä käynnissä olevan koulutuksen aikana.
User Guide (W1–W4)
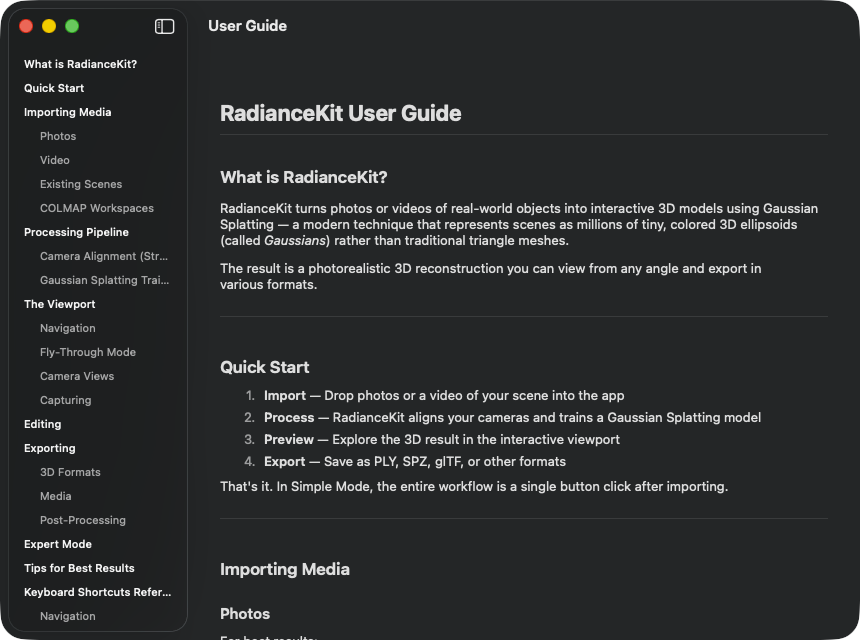
Mikä se on: Sisäänrakennettu ohjeikkuna, joka renderöi sovelluksen mukana toimitetun guide_<kieli>.md-tiedoston. Kieli päätellään Asetuksista (General-välilehti → Language) tai, jos siellä lukee ”System”, macOS:n kieliasetuksista. Asettelu on klassinen: vasemmalla sivupalkki kaikilla otsikoilla, oikealla leipäteksti.
Kun tarvitset nopean muistutuksen yksittäisestä asiasta – siis hakusanan korvikkeena. Tämä käyttöopas on kattava viiteopas; sisäänrakennettu ohjeikkuna on pikemminkin kuin komentorivin –help-komento. Se päivitetään jokaisen sovellusjulkaisun yhteydessä, mutta pidetään sisällöltään pintapuolisempana.
W1NavigationSplitView (sivupalkki + yksityiskohdat)
MISSÄ
Help → User Guide (⌘?)...
TEKNINEN
Kaksipalstainen asettelu, jossa on kapea sivupalkki (vähintään 180 pt leveä) sisällysluettelopuulle ja vieritettävä yksityiskohta-alue varsinaiselle Markdown-sisällölle. Ikkunan vähimmäiskoko on 700 × 500 pt. Ensimmäisellä avauskerralla ikkuna lataa sopivan guide_<lang>.md-tiedoston sovelluspaketista (varalla guide_en.md), jäsentää sen lohkotietueiksi (otsikot H1–H4, kappaleet, luettelot, taulukot, erotinviivat) ja poimii erikseen otsikkorakenteen sivupalkkia varten. Sisäinen muotoilu (lihavointi, kursivointi, koodinpätkä) renderöidään sisäänrakennetulla Markdown-moottorilla. Kieli luetaan sovelluksen asetuksista, erikoistapauksina kiina (zh-Hans) ja brasilianportugali (pt-BR), jotka säilytetään täysinä locale-tunnisteina, koska nämä variantit eroavat kielistä zh ja pt.
W2List (otsikkosivupalkki)
MISSÄ
User Guide -ikkunan vasen sarake..
TEKNINEN
Luettelo kaikista nykyisen Markdown-dokumentin H2- ja H3-otsikoista. H2-merkinnät näkyvät ilman sisennystä Medium-kirjasinpainolla, H3-merkinnät 16 pt:n sisennyksellä vasemmalla ja himmennetyllä etualan tyylillä. H4 ja syvemmät jätetään huomiotta, koska syvyys tekisi sivupalkista epäselvän. Ankkuri-ID:t luodaan otsikkotekstistä slugifioimalla (pienet kirjaimet + välilyönnit viivoiksi + suodatus kirjaimille/numeroille/viivoille – sama algoritmi, jota GitHub käyttää Markdown-ankkureilleen, jotta myös ulkoiset URL-osoitteet dokumentaatioon voisivat mahdollisesti päätyä samaan ankkuriin). Luettelo käyttää natiivia macOS-tyyliä.
W3Painike (otsikko → ankkurihyppy)
MISSÄ
Yksi painike per sivupalkin rivi..
TEKNINEN
Jokainen sivupalkin merkintä on painike, joka asettaa nykyisen ankkurin, mutta näyttää visuaalisesti luettelomerkinnältä. Tarkkailijamuuttuja laukaisee sitten vierityshypyn vastaavaan ankkuriin pehmeällä 0,3 sekunnin animaatiolla. Hypyn jälkeen ankkuriarvo nollataan, jotta seuraava napsautus samaan ankkuriin laukeaa uudelleen (muuten tarkkailija ei laukeaisi uudelleen, koska arvo ei ole muuttunut).
W4ScrollView (yksityiskohtainen sisältö)
MISSÄ
Oikea sarake..
TEKNINEN
Vieritettävä, pystysuunnassa pinoava sisältöalue laiskalla renderöinnillä, koska pidemmissä oppaissa voi helposti olla yli 200 Markdown-lohkoa – ei-laiska versio instansioisi kaikki samanaikaisesti. Jokainen lohko saa oman ID:n, joko otsikkoankkurin (hypättäville H1–H3) tai indeksipaikkamerkin. Maksimileveys on 720 pt, täyte 32 vaaka- / 24 pystysuunnassa, jotta pitkät rivit säilyttävät hyvän luettavuuden. Taulukot renderöidään soluittain vaakasuuntaisilla pinoilla ja erotinviivoilla; sisäinen koodi sisäänrakennetulla Markdown-moottorilla. Oikeita koodilohkoja käsitellään tällä hetkellä kappaleina – tämä on tunnettu ohjeikkunan rajoitus.
Pikanäppäimet (W5–W6)
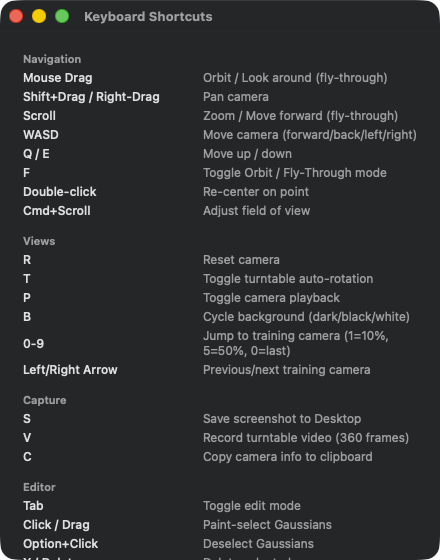
Staattinen viiteluettelo viidessä osiossa. Navigointi: Hiiren veto (Orbit/Fly), Shift+veto/Oikea-veto (Pan), Vieritys (Zoom), WASD (Fly-Through-liike), Q/E (Ylös/Alas), F (Vaihda Orbit/Fly), Kaksoisnapsautus (Keskitys uudelleen), Cmd+Vieritys (FoV-säätö). Näkymät: R (Nollaa kamera), T (Automaattinen kierto), P (Kameran toisto), B (Vaihda taustaa), 0–9 (Hyppää koulutuskameraan 1=10%/5=50%/0=viimeinen), Vasen/Oikea nuoli (Edellinen/Seuraava kamera). Kaappaus: S (Kuvakaappaus työpöydälle), V (Kääntöpöytävideo), C (Kopioi kameran tiedot). Editori: Tab (Muokkaustila), Napsautus/Veto (Maalausvalinta), Option+Napsautus (Poista valinta), X / Delete (Poista valinta), Cmd-Z (Kumoa viimeisin poisto), [ / ] (Siveltimen koko pienempi/suurempi), Esc (Peruuta valinta). Koulutus: Käynnistä, Tauko/Jatka, Peruuta, Jatka +5K/+10K/+20K valikon pikanäppäimillä M9–M14.
Mikä se on: Yksinkertainen staattinen yleiskatsaus kaikista pikanäppäimistä – Navigation, Views, Capture, Editor, Training. Sisältö on kovakoodattu, ei Markdown-latausta.
Kun etsit nopeinta tapaa tehdä jotain näkymässä. WASD-fly-through, R kameran nollaukseen, B taustan vaihtoon – kaikki löytyvät täältä.
W5ScrollView (sisältöalue)
MISSÄ
Help → Keyboard Shortcuts (⌘/)...
TEKNINEN
Yksinkertainen vieritysalue, jossa on pystysuuntainen luettelo. 20 pt:n täyte joka puolella, ei sivupalkin navigointipuuta (luettelo on riittävän lyhyt). Sisältö on ryhmitelty viiteen osioon (Navigation, Views, Capture, Editor, Training). Yksi rivi per näppäinyhdistelmä, jossa on käännettävä teksti molemmissa sarakkeissa. Vasen sarake (näppäinkoodi) on kiinnitetty 180 pt:n leveyteen, jotta kuvaukset oikealla pysyvät pystysuunnassa linjassa. Ei vuorovaikutusta paitsi vieritys – rivin napsauttaminen ei tee mitään, pikanäppäimet ovat oikeita näppäimistömuuntimia valikossa ja näkymässä.
W6VStack (pikanäppäinosiot)
MISSÄ
ScrollView'n sisällä..
TEKNINEN
Vasemmalle tasatut, pinotut osiot 16 pt:n välillä. Viiden osion sisällä on otsikko ja rivien sarja. Otsikot käyttävät toissijaista alaotsikkotyyliä – tarkoituksella ei otsikkomuotoa, koska osioiden ei tarvitse olla navigoitavissa. Sisältö on tarkoituksella litteä (ei avattavia osioita, ei hakua, ei suodatinta), jotta komponentti toimii muuttumattomana kaikissa macOS-versioissa ja tiedosto pysyy luettavana.
Tallennustilan hallinta (W7–W12)
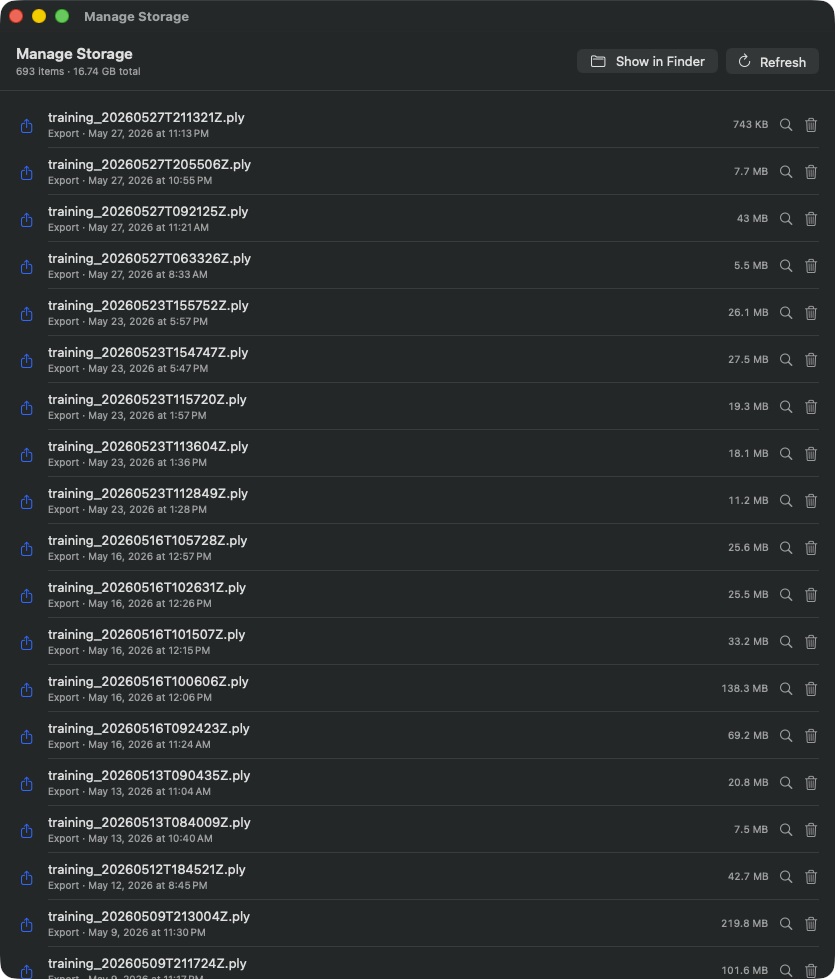
Taulukkonäkymä kaikista RadianceKitin hallinnoimista tiedostoista. Ylätunnisteessa on 693 kohdetta, yhteensä 16,74 Gt. Yläpalkissa: ”Show in Finder” + ”Refresh”. Jokaisella rivillä: PLY-kuvake, tiedostonimi (esim. training_20260527T211321Z.ply), export-päivämäärä, koko (vaihtelee 7 kt – 218 Mt), suurennuslasikuvake (Reveal) ja roskakorikuvake (Move to Trash). Tiedostot on lajiteltu päivämäärän mukaan, uusimmat ylhäällä. Tässä demo-otoksessa PLY-exportit ovat hallitsevia, koska on käytetty paljon –benchmark-optiota.
Mikä se on: Levynkäytön yleiskatsaus kaikesta, mitä RadianceKit tallentaa kansioon ~/Documents/RadianceKit/ – lokit, exportit, scenet, Capture-paketit (iOS-kumppanisovelluksesta), importit (syötekuvien väliaikaiskopiot). Jokaisella merkinnällä on koko tavuina ja kaksi painiketta: ”näytä Finderissa” ja ”siirrä roskakoriin”. Tämä EI OLE automaattinen siivous – sovellus ei poista mitään itse; sinä päätät jokaisen merkinnän kohdalla.
Kun levy alkaa täyttyä. Erityisesti lokit kerääntyvät (yksi JSONL per koulutusyritys, plus _qualityMetrics.json); tietysti myös exportit (PLY 100 % raakadataa, yksi per export). Hyödyllinen myös kaatumisen jälkeen, jos Imports-väliaikaishakemistossa on vielä vanhoja kopioita syötekuvista (katso ”Disk-pressure incident” tiedostossa dev_v549f-needle-reduction.md).
W7Painike ”Show in Finder”
MISSÄ
Ylätunnisteessa oikealla tallennustilan selainikkunassa..
TEKNINEN
Avaa koko RadianceKit-hakemiston (~/Documents/RadianceKit/) Finderissa, jotta voit nähdä kansiorakenteen suoraan ja käsitellä sitä myös Finderilla. Toiminto avaa uuden Finder-ikkunan eikä vaihda sovelluksen hiekkalaatikkokonttiin – ~/Documents/RadianceKit/ on sovellusten normaalisti käytettävissä oleva Documents-domain, ei hiekkalaatikoidun kontin polku.
W8Painike ”Refresh”
MISSÄ
Ylätunnisteessa, Finder-painikkeen vieressä..
TEKNINEN
Käynnistää taustaskannauksen, joka suoritetaan käyttäjän käynnistämässä asynkronisessa tehtävässä, jotta suurten hakemistopuiden skannaus ei estä käyttöliittymää. Varsinainen läpikäynti käy läpi jokaisen tunnetun alikansion (Logs, Exports, Scenes, Captures, Imports) ja luo tallennusmerkinnän jokaisesta suorasta lapsesta. Jokaiselle merkinnälle määritetään rekursiivinen koko – ensisijaisesti todellinen levynkäyttö (mukaan lukien APFS-kovalinkkien jakaminen) ja varalla looginen tiedostokoko.
W9List (tallennusmerkinnät)
MISSÄ
Pääsisältö ylätunnisteen alla..
TEKNINEN
Luettelo, jossa jokaisella rivillä on tämä asettelu: kategoria- kohtainen SF-symbolikuvake (dokumentti lokeille, latausnuoli exporteille, kuutio sceneille, tarjotin importeille), nimi + alaotsikko (lapsen nimi + muotoiltu muokkauspäivämäärä), tavulaskuri oikealla (oikealle tasattu, monospaced), Reveal-painike (suurennuslasikuvake), Trash-painike (roskakori). Lajittelu: ensisijaisesti lapsen mukaan (Scenes ensin, sitten Exports, Logs, Captures, Imports, Other), toissijaisesti muokkauspäivämäärän mukaan laskevasti (uusimmat ylhäällä). Jos skannaus on vielä käynnissä, paikalla näytetään ”Scanning…”-edistymispalkki. Jos mitään ei löydy, näytetään tyhjän tilan ilmoitus tarjotinkuvakkeella.
W10Rivipainike ”Reveal in Finder”
MISSÄ
Jokaisella rivillä, suurennuslasikuvake oikealla..
TEKNINEN
Avaa Finderin ja valitsee kyseisen kohteen (tiedoston tai kansion). Ero W7:ään: W7 avaa juurihakemiston; W10 merkitsee juuri tämän yhden kohteen. Käytännöllinen työnkulku: tunnista suuri kohde, napsauta suurennuslasia, kopioi se sitten esimerkiksi ulkoiselle asemalle.
W11Rivipainike ”Move to Trash”
MISSÄ
Jokaisella rivillä, roskakorikuvake suurennuslasin vieressä..
TEKNINEN
Laukaisee vahvistusdialogin (W12). Vasta vahvistuksen jälkeen suoritetaan macOS:n standarditoiminto ”siirrä roskakoriin” (eli palautettavissa, ei suoraa poistoa). Onnistuneen roskakoriin siirron jälkeen merkintä poistetaan luettelosta ja kokonaistavulaskuri päivitetään. Virhetilanteissa näytetään modaalinen virheilmoitus.
W12ConfirmationDialog (poistovahvistus)
MISSÄ
Laukaistaan W11:llä, esitetään macOS-sheetinä..
TEKNINEN
Standardi vahvistusdialogi dynaamisella otsikolla ”Delete ?” ja viestirivillä, joka nimenomaisesti huomauttaa, että kohde siirtyy roskakoriin ja on sieltä palautettavissa (kunnes roskakori tyhjennetään). Kaksi painiketta: ”Move to Trash” tuhoavana toimintona (punaisella) ja ”Cancel” automaattisella Esc-sidonnalla. Dialogi on ei-modaalinen siinä mielessä, että se estää vain tämän ikkunan, ei koko sovellusta – tämä on macOS:n standardi palautettaville poistoille.
Pareto-koontinäyttö (W13–W22)
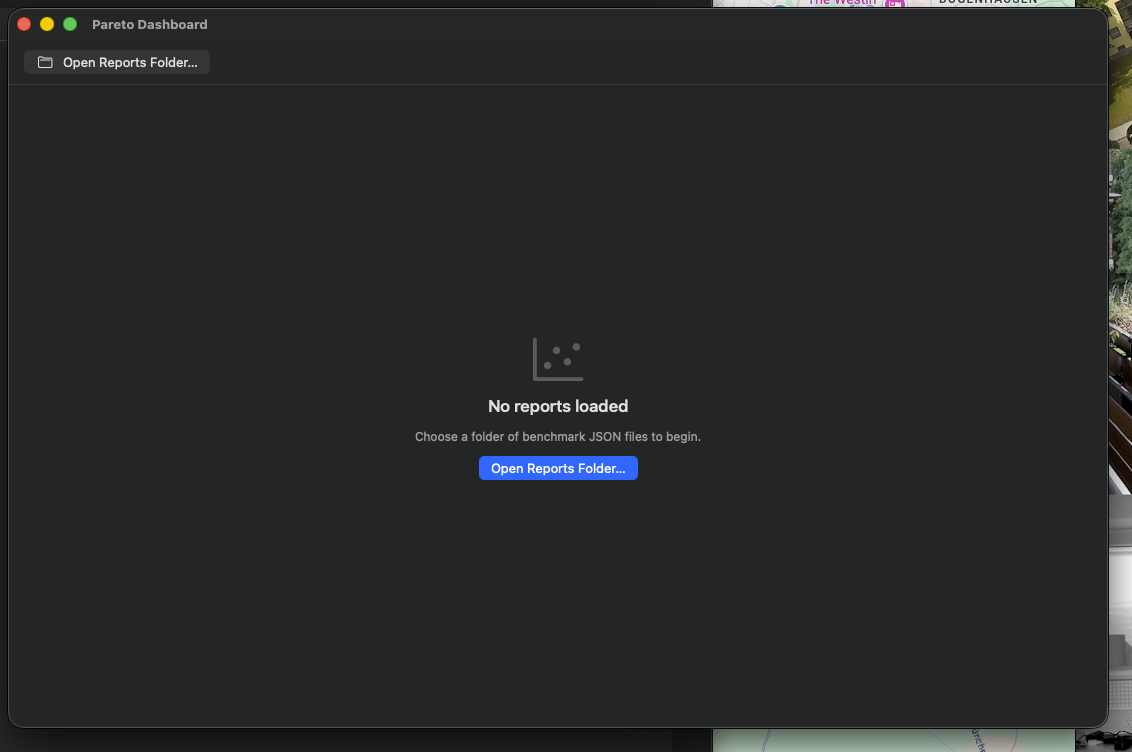
Tyhjä tila (ensimmäisen avaamisen jälkeen) – tyhjä tila, jossa kehotus ”Open Reports Folder…”. Datapisteet ilmestyvät, kun koulutusraportit on ladattu, katso seuraava kuva.
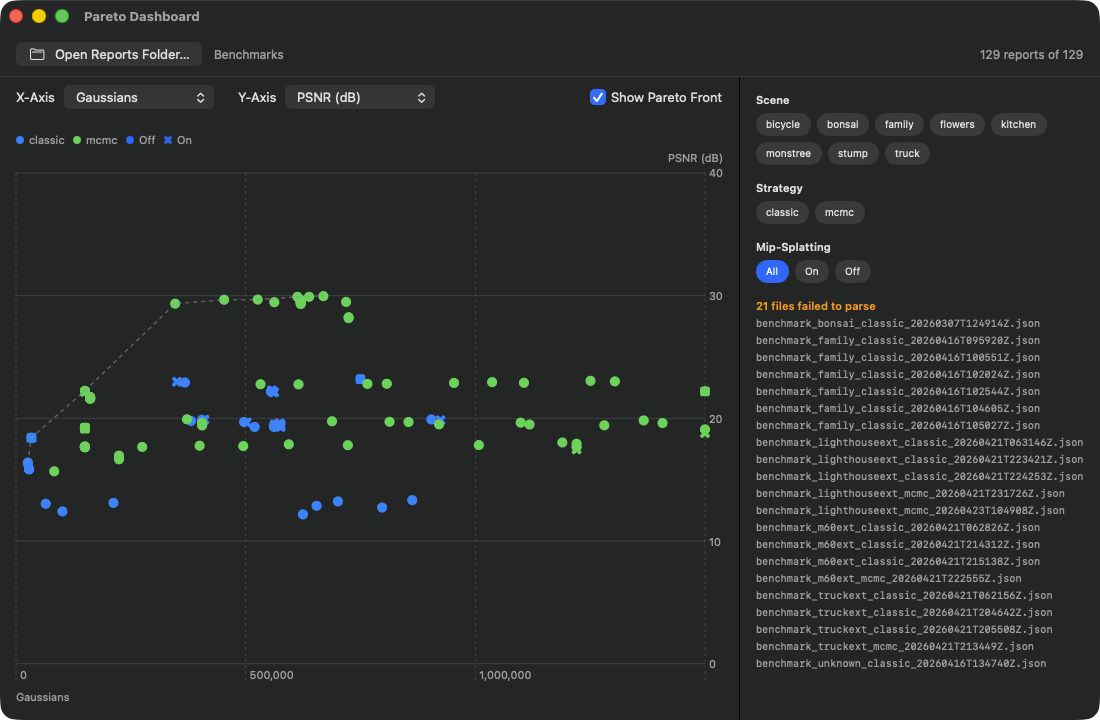
Ylätunnisteen työkalupalkissa lukee ”129 reports of 129” (kaikki valitun kansion raportit jäsennetty onnistuneesti – 21 ylimääräistä tiedostoa ei voitu jäsentää vanhemman formaatin vuoksi, katso huomautusluettelo oikealla). Akselit: X-akselin valitsin on Gaussians, Y-akselin valitsin on PSNR (dB). Hajontakaavio: vihreät pisteet = Classic-strategia, siniset pisteet = MCMC. Katkoviivoitettu Pareto-rintamaviiva kulkee parhaiten saavutettujen PSNR-arvojen mukaisesti ja tasaantuu PSNR≈30 dB:n kohdalle noin 500K Gaussiansin jälkeen. Suodatinpillerit oikealla: 7 scenet (bicycle, bonsai, family, flowers, kitchen, stump, truck), 2 strategiaa (classic, mcmc), 3 Mip-Splatting-vaihtoehtoa (All, On, Off). Tällä hetkellä kaikki suodattimet ovat auki, mistä johtuu tiheä pisteklusteri.
Mikä se on: Usean ajon vertailutyökalu. Olet aiemmin kouluttanut useita scenejä tai samaa sceneä eri esiasetuksilla – jokainen näistä koulutusajoista tuottaa (jos olet käyttänyt –benchmark-optiota tai käynnistänyt Benchmark-toiminnon kautta) JSON-raporttitiedoston, joka sisältää muun muassa lopullisen PSNR:n, SSIM:n, LPIPS:n, Gaussian-määrän ja kellonajan. Koontinäyttö lukee kokonaisen kansion tällaisia raportteja kerralla ja piirtää ne 2D-hajontakaaviona valittavilla akseleilla. Lisäksi Pareto-rintama (ei-dominoitujen pisteiden joukko) piirretään katkoviivalla.
Kun olet luonut vähintään kolme tai neljä koulutusraporttia. Vähemmillä pisteillä rintamaviiva ei ole merkityksellinen. Tyypillinen käyttötapaus: olet yrittänyt rekonstruoida ulkosceneä ja olet kokeillut peräkkäin P3 Balanced (Classic), P4 Quality (Classic), P7 MCMC Quality ja P9 Outdoor (tuned) – nyt haluat tietää, mikä konfiguraatio tarjoaa parhaan PSNR:n per koulutusaikasekunti tai mikä tarvitsee vähiten Gaussianeja tietylle PSNR:lle.
Molemmat akselit ovat vapaasti valittavissa (X-akseli: psnr, ssim, lpips, …; Y-akseli samoin). Pareto-rintamalogiikka ParetoFront2D.indices-koodissa tietää jokaiselle metriikalle, onko ”pienempi on parempi” (esim. LPIPS, Loss, Time) vai ”suurempi on parempi” (PSNR, SSIM) – viiva kulkee siis akselivalinnasta riippuen vasemmalta alhaalta oikealle ylös tai vasemmalta ylhäältä oikealle alas, aina parhaan saavutetun yhdistelmän mukaisesti. Piste on Pareto-optimaalinen, jos MIKÄÄN muu piste ei ole MOLEMMISSA ulottuvuuksissa vähintään yhtä hyvä (eli mikään muu ei dominoi sitä). Pareto-optimaaliset pisteet sijaitsevat viivalla, muut pisteet sen oikealla/yläpuolella (akselien suuntauksesta riippuen). Pisteet viivalla ovat todellisia ehdokkaita ”parhaaksi esiasetukseksi”; pisteet KAUKANA viivasta ovat hukattua koulutusaikaa.
Voit rajoittaa valinnan tiettyyn sceneen (jos haluat esimerkiksi verrata vain ulkoajoja), tiettyyn strategiaan (Classic tai MCMC) tai Mip-Splattingin päälle/pois-tilaan (relevantti vaiheen Q1.5 jälkeen, jossa Mip säilyy valinnaisena Advanced-lippuna).
Sinulla on kolme raporttia ”truck”-scenelle kansiossa ~/Documents/RadianceKit/Reports/: Ajo A (P4 Quality, 40K iteraatiota, 524K Gs, 105 s, PSNR 23.4), Ajo B (P7 MCMC, 200K iteraatiota, 150K Gs, 693 s, PSNR 24.6), Ajo C (P9 Outdoor, 100K iteraatiota, 1.25M Gs, 312 s, PSNR 25.8). Aseta X-akseliksi trainingTime, Y-akseliksi PSNR. Ajo B on oikealla ylhäällä, Ajo C vielä kauempana oikealla ylhäällä, Ajo A vasemmalla alhaalla. Pareto-rintama yhdistää A:n ja C:n – molemmat ovat ei-dominoituja. Ajo B on ”hävinnyt” (C on parempi sekä ajassa ETTÄ PSNR:ssä). Havainto: ”truck”-scenelle MCMC-oletus ei kannata; joko nopea+ok (A) tai hidas+erittäin hyvä (C). Tallenna C:n konfiguraatio omaksi esiasetukseksi (Tarkastaja → I1 Save Preset).
Seuraava toimenpide: Tallenna paras konfiguraatio esiasetukseksi. Konkreettisesti: katso Pareto-pisteitä (hiiren vienti näyttää PSNR/SSIM/LPIPS/Gs/Time työkaluvihjeessä), päätä mikä sopii sinulle parhaiten ajan ja laadun kompromissina, avaa vastaava raportti (tiedostonimi sisältää ajon aikaleiman), kopioi sen koulutuskonfiguraatio uuteen ajoon tai tallenna se seuraavan koulutusistunnon jälkeen esiasetukseksi Tarkastajan kautta.
W13Painike ”Open Reports Folder…”
MISSÄ
Työkalupalkki ylhäällä vasemmalla..
TEKNINEN
Avaa kansionvalintaikkunan, jossa on kehotus ”Select a folder containing benchmark .json reports”. Vahvistuksen jälkeen taustatehtävä jäsentää kaikki kansion .json-tiedostot peräkkäin. Virheelliset raportit (rikkinäinen JSON, väärä skeema) kerätään ja näytetään sivupalkin alaosassa muodossa ”N file failed to parse” – ei kaatumista. Jos toinen napsautus tapahtuu, kun ensimmäinen lataus on vielä kesken, edellinen tehtävä keskeytetään, jotta kaksi tulosta ei kirjoita tilaan samanaikaisesti.
Myös CLI:n kautta: –dashboard-dir /polku/raportteihin lataa kansion heti sovelluksen käynnistyessä.
W14Valitsin ”X-Axis”
MISSÄ
Kaavion yläpuolella, vasemmalla..
TEKNINEN
Valikkovalitsin, jossa on kaikki saatavilla olevat koontinäytön metriikka-akselit (PSNR, SSIM, LPIPS, Gaussian-määrä, koulutusaika ja niin edelleen). Oletus on Gaussian-määrä. Vaihdettaessa hiiren päällä oleva piste nollataan, koska aiemmin korostettu sijainti vanhassa akselikoordinaatistossa ei ole enää mielekäs akselin vaihdon jälkeen. Valitsin on rajoitettu sisällön leveyteen, jotta se ei veny koko leveyden yli.
W15Valitsin ”Y-Axis”
MISSÄ
Kaavion yläpuolella, X-akselin vieressä..
TEKNINEN
Identtinen W14:n kanssa, paitsi että oletus on PSNR. Akselivalinta tallennetaan itsenäisesti, joten käyttäjä voi valita myös järjettömiä yhdistelmiä (X=PSNR, Y=PSNR – heittäisi kaikki pisteet diagonaalille). Tällaisia yhdistelmiä ei kuitenkaan estetä; tämä on tietoinen päätös, koska vertailu ”SSIM vs PSNR” on varsin mielenkiintoinen nähdäksesi, kuinka johdonmukaisesti metriikat käyttäytyvät.
W16Vipukytkin ”Show Pareto Front”
MISSÄ
Akselivalitsimien oikealla puolella..
TEKNINEN
Standardi macOS-vipukytkin. Kun se on aktiivinen, Pareto-kaavioon piirretään pistepilven lisäksi viiva lasketulla 2D-Pareto-rintamalla. Tyyli: katkoviiva (viivakuvio 4–4), harmaa puoliläpinäkyvä, viivan paksuus 1,5 pt. Pareto-laskenta suoritetaan pääsäikeessä – tyypillisellä raporttien määrällä (≤ ~50) tämä on ongelmitta nopea. Kun vipukytkin on pois päältä, viiva jätetään pois, jolloin vain paljaat pisteet jäävät näkyviin.
W17Pillerit ”Scene”-suodatin
MISSÄ
Koontinäytön oikea sivupalkki..
TEKNINEN
Suodatinpillerit jokaiselle ladatuissa raporteissa esiintyvälle scenelle. Oma flow-asettelu, joka rivittää pillerit automaattisesti useille riveille, kun leveys on käytetty loppuun. Aktiiviset pillerit saavat korostustaustan, passiiviset neutraalin standardimateriaalitaustan. Monivalinta on mahdollista (joukko-semantiikka); jos yhtään pilleriä ei ole valittu, kaikki scenet katsotaan ”läpäisseiksi” – eli joukkologiikka on ”tyhjä valinta = kaikki”, ei ”tyhjä valinta = ei mitään”.
W18Pillerit ”Strategy”-suodatin
MISSÄ
Scene-suodattimen alla sivupalkissa..
TEKNINEN
Täsmälleen kuten W17, mutta koulutusstrategioille – tyypillisesti kaksi arvoa ”classic” ja ”mcmc”, jotka on johdettu benchmark-raporttien JSON-tiedostojen Strategy-kentästä. Hyödyllinen, jos sinulla on molempien strategioiden raportteja sekoitettuna ja haluat nähdä vain yhden tyypin (esim. ”näytä vain MCMC-ajot, koska olen jo sulkenut Classicin pois”).
W19Pillerit ”Mip-Splatting”-suodatin
MISSÄ
Strategy-suodattimen alla sivupalkissa..
TEKNINEN
Kolmiarvoinen suodatin (joukon sijaan kuten W17/W18): ”All” / ”On” / ”Off”. Tausta: Mip-Splatting arvioitiin vaiheessa Q1.5 kokeellisena monimittakaavaisena parannuksena, ja lopullinen tuomio oli ”ei selkeää voittoa kautta linjan; säilytetään valinnaisena lippuna”. Jos teet Mip-on/off-vertailuja, haluat usein pystyä erottelemaan ne hyvin tarkasti. Siksi oma kolmiarvoinen suodatin tiloilla ”salli kaikki”, ”vain Mip päällä”, ”vain Mip pois päältä”. Sivupalkin osio näytetään vain, jos datamäärässä on vähintään yksi Mip-raportti JA vähintään yksi ei-Mip-raportti (muuten suodatus ei ole mielekästä).
W20ChipButton (suodatinvipu, all/on/off)
MISSÄ
Apukomponentti, käytetään W17/W18/W19:ssä..
TEKNINEN
Minimalistinen painikekääre. Sisältö: etiketti- teksti Caption-kirjasinkoolla ja 10 vaaka- / 5 pystysuuntaisella täytteellä. Tausta ehdollinen: jos aktiivinen → sovelluksen korostusväri valkoisella tekstillä; muuten neutraali standardimateriaalitausta mustalla tekstillä. Muoto on kapseli (pillerimäinen). Plain-painiketyyli, jotta kapseli- materiaalia ei peitä järjestelmän reuna.
W21Kaavio (Pareto-hajontakaavio)
MISSÄ
Koontinäytön keskialue..
TEKNINEN
Swift Charts -kaavio kahdella kerroksella: 1. yksi piste per raportti – sijainti valituista X- ja Y-metriikoista, väri strategian mukaan, symboli Mip-tilan mukaan. Symbolin koko normaali 80, korostettu 200 (jos ID vastaa hiiren päällä olevaa raporttia). 2. viiva Pareto-rintamalle, vain jos vipukytkin on päällä.
Kaavion peittokuva: läpinäkyvä suorakulmio rekisteröi hiiren liikkeen; joka kehyksessä määritetään euklidisesti lähin pistepositio kaavion kehyksessä ja hiiren päällä oleva raportti päivitetään, jos etäisyys on alle 24 px (muuten nollataan). Näin saat työkaluvihjeen ilman napsautusta – hiiren vienti riittää.
W22Työkaluvihje (hiiren vienti -yksityiskohdat)
MISSÄ
Kaavion alla, näytetään hiiren viennin yhteydessä..
TEKNINEN
Vaakasuuntainen pino: scenen nimi (otsikko), strategia-tagi (caption), erotinviiva, sitten PSNR/SSIM/LPIPS/Gs/Time-metriikat kukin omassa pienessä pystysuuntaisessa ryhmässään (etiketti + monospaced-arvo). Jos Mip oli aktivoitu, lisäksi ”Mip”-kapselitagi korostusvärillä. Tausta puoliläpinäkyvä sumennus, pyöristetty suorakulmio 8 pt:n säteellä. Näytetään vain, kun hiiri on todella pisteen päällä. Katoaa automaattisesti poistuttaessa.
Holdout-analyysi (W23–W29)
Tyhjä tila, jossa kehotus ”Open transforms.json…”. Hyväksyy NeRF-Studio- ja Instant-NGP-formaatin.
Tyhjä tila (ensimmäisen avaamisen jälkeen) – kameramerkit ilmestyvät, kun transforms.json on ladattu, katso seuraava kuva.
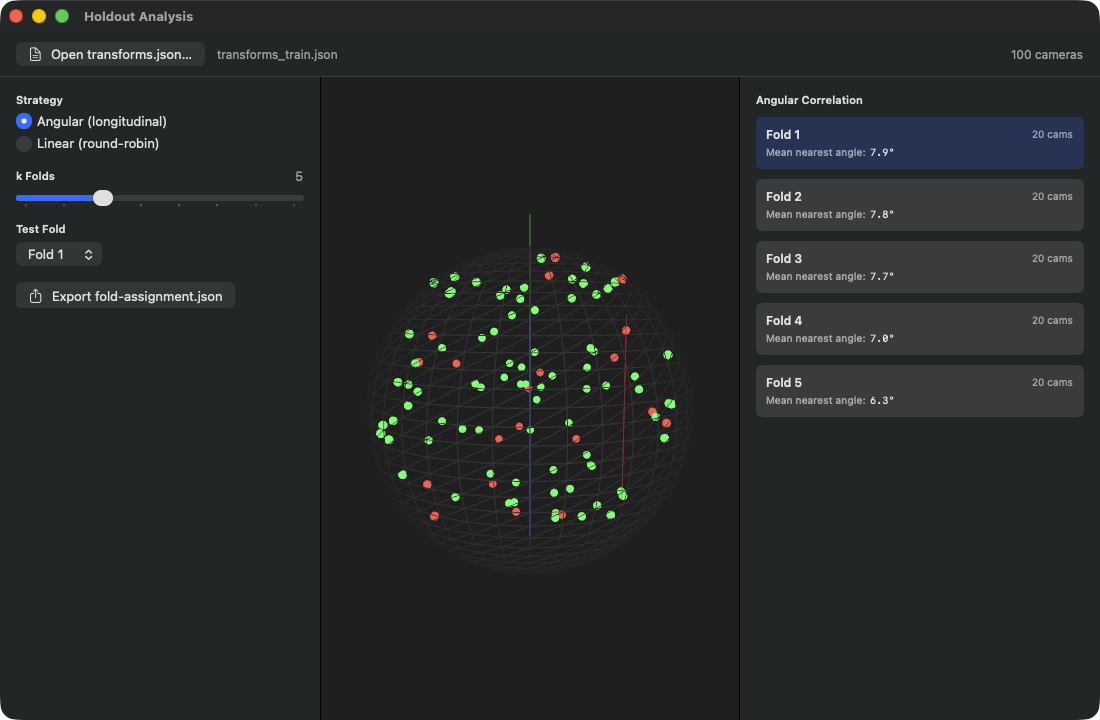
Ylätunnisteessa näkyy ladattu tiedosto (transforms_train.json) ja kameroiden määrä (”100 cameras”). Vasen sivupalkki: Strategiavalitsin kahdella vaihtoehdolla – Angular (longitudinal) aktiivinen (jakaa foldit pituus-/leveyspiirin sektoreiden mukaan pallolla, jotta jokainen testifoldi on geometrisesti tiheä) vs. Linear (round-robin) (järjestyspohjainen, kaikki k:nnet kuvat testijoukkona). k-Folds-liukusäädin on asennossa 5, Test-Fold-valitsin on Fold 1. Export-painike luo fold-assignment.json-tiedoston Nerfstudiolle/Instant-NGP:lle. Keskipaneeli: 3D-palloprojektio kaikista 100 kamerasta – vihreät pisteet = Train, punaiset pisteet = nykyinen testifoldi (Fold 1, jossa 20 kameraa). Oikea sivupalkki (Angular Correlation): per foldi 20 kameraa + Mean Nearest Angle (Fold 1: 7.9°, Fold 2: 7.8°, Fold 3: 7.7°, Fold 4: 7.0°, Fold 5: 6.3°) – pienempi arvo tarkoittaa, että kamerat tässä foldissa ovat lähellä toisiaan, eli holdout-jako on spatiaalisesti yhtenäinen.
Mikä se on: 3D-visualisointityökalu kamerajärjestelyllesi ristiinvalidoinnin logiikalla. Lataat transforms.json-tiedoston (Nerfstudion / Instant-NGP:n standardiformaatti kameraposeille), sovellus lukee kaikki kamerat, projisoi niiden katselusuunnat yksikköpallolle ja näyttää ne pieninä pallomerkkeinä virtuaalisella maapallolla. Sitten se jakaa kamerat k foldiin (valitun strategian mukaan: angular tai linear), merkitsee vihreällä koulutusosuuden ja punaisella testiosuuden (holdout), ja laskee jokaiselle foldille Angular-Correlation-pisteet, jotka kertovat, kuinka kaukana testifoldi on katselukulma-avaruudessa koulutusfoldista.
Kun haluat tehdä holdout-evaluointia – eli: kuinka hyvin mallisi yleistyy näkemättömiin katselukulmiin? Standardi koulutuksessa on ”joka 8. näkymä holdoutina” (Mip-NeRF360-käytäntö), mutta se on hyvin lineaarinen jako. Jos kuvasi ovat esimerkiksi ajallisesti klusteroituneita (ensin yksi puoli kohteesta, sitten toinen), niin ”joka 8.” ei ole edustava – satunnainen sekvenssin sijainti päätyy testiin, mutta kaikki sen naapurit ovat koulutuksessa, mikä on liian helppoa. ”Angular”-strategialla stratifioidaan sen sijaan katselukulma-avaruuden yli: jokainen foldi sisältää kameroita kaikilta kiertoradan alueilta, jotta testi todella testaa yleistämisaukkoja.
Angular vs. Linear: - Angular (oletus): jakaa kamerat pituusastekulman (φ-koordinaatti Y-akselin ympäri) mukaan k yhtä suureen sektoriin. Fold 0 ovat kameroita, joiden φ ∈ [0°, 360/k°), Fold 1 seuraavat, ja niin edelleen. Etu: jokainen foldi kattaa osan kiertoradasta; testifoldi on spatiaalisesti kompakti mutta laajasti hajautettu koko datajoukkoon. Hyvä klassisille kiertorata-kuvauksille. - Linear (Round-Robin): Fold-indeksi = (kuvan_indeksi modulo k). Tämä on yksinkertainen ”joka k:s”-jako. Toimii, jos kuvajärjestyksessä EI OLE spatiaalista vinoumaa (esim. satunnaisesti lajitellut drone-kuvat). Toimii huonosti, jos kuvat ovat ajallisesti klusteroituneita.
3D-pallossa näet heti: vihreät pisteet (koulutus) ja punaiset pisteet (testi). Jos punaiset pisteet ovat kaikki yhdessä nurkassa, holdout on huono (ei hyvä yleistämistesti). Jos ne ovat tasaisesti vihreiden välissä, se on hyvä. Angular-Correlation-pisteet per foldi (oikea sivupalkki, asteina) kertovat lisäksi: pienempi arvo = testi on lähellä koulutusta (jokaisella testikameralla on lähellä oleva koulutuskamera, helppo testi); suurempi arvo = testi on kaukana koulutuksesta (vaikeampi yleistäminen).
Olet kuvannut Truck-scenesi 251 kuvalla, exportaat valikkokohdalla M33 (Export SfM transforms.json) nerfstudio-tiedoston. Avaa Holdout-ikkuna (⇧⌘H), lataa JSON ”Open transforms.json…” -painikkeella, katso palloa. k=5 (oletus) antaa sinulle 5 foldia. Napsauta ”Fold 3” – katso, ovatko punaiset merkit suunnilleen tasaisesti. Jos ovat: ”Export fold-assignment.json”, aseta exportattu tiedosto Reports-kansioon, ja seuraavassa koulutusajossa –benchmark-optiolla (tai vastaavilla Tarkastajan asetuksilla) käytetään juuri tätä fold-jakoa testiholdoutina – standardin ”joka 8.” sijaan.
W23Painike ”Open transforms.json…”
MISSÄ
Työkalupalkki ylhäällä vasemmalla..
TEKNINEN
Avaa tiedostonvalintaikkunan, joka on rajoitettu JSON- tiedostoihin. Vahvistuksen jälkeen Holdout-moduuli lataa tiedoston. Lataaja jäsentää sekä nerfstudio-formaatin (kameran intrinsiikit plus luettelo kehyksistä kuvapolulla ja muunnosmatriisilla) että instant-ngp-formaatin (sama rakenne). Jokaisesta kehyksestä katselusuunta poimitaan muunnosmatriisista (kameran paikallisen kannan z-akseli) ja tallennetaan. Jos jäsennys epäonnistuu, tila-alueella näytetään virheilmoitus.
Myös CLI:n kautta: –holdout-file /polku/transforms.json käynnistää ikkunan suoraan ladatulla tiedostolla.
W24Valitsin ”Strategy” (angular/linear)
MISSÄ
Vasen sivupalkki, ylhäällä..
TEKNINEN
Radiopainikevalitsin kahdella vaihtoehdolla: Angular ja Linear. Strategian vaihto käynnistää automaattisesti foldien uudelleenlaskennan. Katselusuunnat ovat lista 3D-yksikkövektoreita pallolla; Angular-strategia projisoi ne pituusastekulmaan φ ja lajittelee, Linear-strategia tekee yksinkertaisesti modulo-jaon kehysindeksin perusteella.
W25Liukusäädin ”k Folds”
MISSÄ
Vasen sivupalkki, keskellä..
TEKNINEN
Liukusäädin 3–10, askelväli 1. Muutoksen yhteydessä foldien laskenta käynnistetään automaattisesti uudelleen, jotta foldien luettelo, koulutus/testi-indeksit ja foldikohtaiset pisteet lasketaan heti uudelleen. Valittu arvo näytetään monospaced-numerotekstinä etiketin oikealla puolella.
Nyrkkisääntö: k=5 on standardi (antaa 20 % testin per foldi, mikä on yleistä ristiinvalidoinnissa). k=10, jos sinulla on paljon dataa ja tarvitset enemmän foldeja tilastollisen merkitsevyyden saavuttamiseksi. k=3, jos sinulla on vähän dataa.
W26Valitsin ”Test Fold”
MISSÄ
Vasen sivupalkki, k-liukusäätimen alla..
TEKNINEN
Valikkovalitsin. Vaihtoehdot ovat dynaamisesti 0..<k, etiketti ”Fold 1” – ”Fold N” (eli 1-pohjainen käyttöliittymässä, 0-pohjainen sisäisesti). Jos aiemmin valittu indeksi on ≥ k (esim. koska olet pienentänyt k:n 10:stä 5:een), se nollataan automaattisesti 0:aan. Valittu testifoldi näytetään pallossa punaisella, kaikki muut vihreällä.
W27Painike ”Export fold-assignment.json”
MISSÄ
Vasen sivupalkki, alhaalla..
TEKNINEN
Avaa tallennusdialogin oletus- tiedostonimellä fold-assignment.json. Vahvistuksen jälkeen Holdout- moduuli koodaa nykyisen jaon JSON-skeemaan (kehyskohtainen fold- määritys plus strategia-metatietolohko). Tätä tiedostoa voidaan sitten käyttää seuraavassa koulutuksessa –benchmark-option kanssa, jotta samaa holdoutia käytetään lopullisessa metriikka-arvioinnissa. Kirjoitusvirheet näytetään virhetekstinä; onnistuminen vihreänä tekstinä ”Saved to (filename)”.
W28SCNView (3D-kamerapallo)
MISSÄ
Holdout-ikkunan keskipaneeli..
TEKNINEN
SceneKit-pallonäkymä. Scene koostuu: lankakehyspallosta (säde 1.0, 36 segmenttiä, tummanharmaa), kolmesta värikkäästä akselityngästä (punainen/vihreä/sininen X/Y/Z:lle, kukin 1.2 pitkä), ja per kamera pienestä merkkipallosta (säde 0.03) vastaavassa katselusuunnan sijainnissa yksikköpallolla (hieman ulkopuolella, jotta se ei katoa lankakehyspallon SISÄÄN). Merkkejä EI rakenneta uudelleen jokaisen foldin muutoksen yhteydessä – uudelleenrakennus on tarpeen vain, kun kehysluettelo muuttuu (eli uusi JSON ladataan). Sen sijaan jokaisen päivityksen yhteydessä suoritetaan materiaali- värien päivitys paikan päällä: punainen testi-indekseille, vihreä koulutukselle, vaaleanharmaa jos ei kumpikaan. Näin liukusäätimen muutokset pysyvät suorituskykyisinä myös kun N > 1000 kameraa.
Kameran ohjaus on aktivoitu – voit kääntää, zoomata ja panoroida palloa hiirellä. Valaistus varmistaa, että merkit eivät näytä litteiltä. Tausta on tummanharmaa.
W29FoldCard (napauta valitaksesi foldin)
MISSÄ
Oikea sivupalkki, ”Angular Correlation” -osio..
TEKNINEN
Jokaiselle foldille oma korttinäkymä – pyöristetty suorakulmio 6 pt:n säteellä, 10 pt:n täyte, pystysuuntainen asettelu kahdella rivillä (ylhäällä ”Fold N” + kameroiden määrä, alhaalla ”Mean nearest angle:” + arvo asteina). Taustaväri ehdollinen: aktiivinen foldi = korostusväri puoliläpinäkyvänä, passiiviset = neutraali standardimateriaali. Napautus valitsee foldin, ja pallo värjäytyy reaaliajassa.
”Mean nearest angle” -pisteet ovat keskimääräinen pienin kulma per testikamera lähimpään koulutuskameraan (laskettu sisäisesti radiaaneina, näytetään käyttöliittymässä asteina).
BayesOpt-konsoli (W30–W39)

Tyhjä tila, jossa on hakuavaruuden valitsin (RadianceKit defaults (6-dim)), ajobudjetin liukusäädin (oletus 40), satunnaislukusiemen (42) ja kolme tyhjää paneelia konvergenssikaaviolle, ajolokille ja hakuavaruuden parametriluettelolle.
Tyhjä tila (ensimmäisen avaamisen jälkeen) – konvergenssikaavio ja ajotaulukko täyttyvät, kun ajo on aloitettu, katso seuraava kuva.

Tila ylhäällä oikealla ”Finished — best 0.9943 after 40 trials”. Vasen sivupalkki: Hakuavaruuden valitsin on RadianceKit defaults (6-dim), ajobudjetti 40, satunnaislukusiemen 42. Parametriluettelo näyttää kuusi viritettävää hyperparametria arvoalueineen: mipSmoothing3DScale [0.05, 0.5], mipFilter2DVariance [0.1, 0.6], densifyGradThreshold [5e-07, 5e-06], ssimWeight [0.05, 0.5], mcmcNoiseScale [1e-05, 0.0001], mcmcRelocationInterval [50, 200]. Keskellä: Konvergenssikaavio (X = ajon indeksi 1–40, Y = tavoitearvo 0–1) – harmaat pisteet = alkunäytteet (LHS), siniset pisteet = BayesOpt-hankinta, oranssit pisteet = uudelleenkäynnistysajot (#22 ja #31). Parhaan arvon viiva nousee jyrkästi ajoon ~7 asti, sitten vain marginaalista parannusta ajoon 15 asti, siitä eteenpäin tasainen taso 0.99+:ssa. Oikea sivupalkki: Ajoloki #1–#34 pisteillä + tagilla (init/bo/restart). Save-Best-Config-painike ylhäällä oikealla kirjoittaa bayesopt-best.json.
Mikä se on: Bayesilaisen optimoinnin konsoli hyperparametrien hakuun. Bayes-optimointi on automaattinen menetelmä, joka pyrkii löytämään tuntemattoman funktion optimaalisen pisteen mahdollisimman vähillä kokeiluilla – tyypillisesti: ”mikä yhdistelmä mcmcMaxGaussians, capMultiplier, ssimWeight ja gradThreshold tuottaa parhaan PSNR:n minun sceneluokalleni?” 6^4 = 1296 ajon ruudukon sijaan Bayes-optimointi kokeilee noin 40–100 informoitua ajoa ja pääsee lähelle optimia.
Tärkeää: Sovelluksen nykyinen versio ei suorita optimointia oikeita koulutusajoja vastaan (se kestäisi päiviä), vaan synteettistä demo-objektiivia vastaan – monimodaalista maisemaa, jolla on mäkikiipeilyluonnetta ja hieman kohinaa. Tämä on tarkoituksellista: ikkunan on tarkoitus näyttää sinulle optimoijan käyttäytyminen (konvergenssin kulku, näytepisteet, paras tähän mennessä) ja auttaa sinua ymmärtämään hakuavaruuden määrittelyjä. Oikeisiin koulutuspohjaisiin BayesOpt-ajoihin (kuten vaiheessa Q7 sceneluokan esiasetuksille tehtiin) käytetään erillistä offline- CLI-työnkulkua; tämä ikkuna on live-käyttöliittymäversio.
Kolme käyttötapausta: 1. Haluat ymmärtää, miten BayesOpt toimii – käynnistä demoajo ja tarkkaile konvergenssikaaviota. 2. Suunnittelet uutta sceneluokkaa (esim. ”akvaariot” tai ”antiikkihuonekalut”), joille sisäänrakennetut 10 esiasetusta eivät sovi täydellisesti. Määrittele mielessäsi hakuavaruus, testaa sitä täällä ”Bowl demo” tai ”Densify”-esiasetuksella, exportaa sitten paras konfiguraatio JSON-muodossa ja käytä sitä lähtökohtana oikealle koulutusajolle. 3. Haluat tarkastella RKBayesOpt-paketissa määriteltyjä oletushakuavaruuksia (Mip-osajoukko, RadianceKit-oletukset) – ne on lueteltu vasemman sivupalkin parametripaneelissa.
- Konvergenssikaavio (keskisarake): Y = paras tähän mennessä saavutettu tavoitefunktion arvo. X = ajon indeksi. Aluksi jyrkästi nouseva (BayesOpt kokeilee alkunäytteitä satunnaisesti, jotkut niistä ovat onnekkaita), sitten yhä tasaisempi, koska lähellä optimia oleva alue on hyödynnetty. Jos viiva pysyy tasaisena 20+ ajon ajan, voit pysäyttää ajon – lisäajot eivät tuo enää mitään. Yksittäiset pisteet kaaviossa ovat yksittäisten ajojen arvoja (ei siis ”paras tähän mennessä”), väritetty vaiheen mukaan: harmaa = alkunäyte, sininen = bayesopt-hankinta, oranssi = uudelleenkäynnistys. - Ajotaulukko (oikea sarake): #1, #2, #3, … kukin arvolla ja vaihetagilla. Tähän mennessä paras ajo on merkitty keltaisella tähdellä. Taulukosta voit tunnistaa parhaan ajon ja tarkastella sen parametriarvoja myöhemmin exportin yhteydessä. - Hakuavaruuden tarkastaja (vasen sivupalkki): näyttää valitulle esiasetukselle kaikki parametrien nimet ja niiden hakuavaruudet [lo, hi]. Kun olet esiasetuksessa ”RadianceKit defaults (6-dim)”, näet esim. ”densifyGradThreshold [5e-7, 5e-6]” – eli log-uniformisti näiden kahden arvon välillä.
Valitse esiasetus ”RadianceKit defaults (6-dim)”, ajobudjetti 40, siemen 42. Napsauta ”Start”. Tarkkaile: ensimmäiset 8 ajoa ovat harmaita (alkunäytteet, LHS-Latin-Hypercube), seuraavat sinisiä (BayesOpt-hankittuja). Konvergenssikaavio nousee jyrkästi ajoon ~15 asti, sen jälkeen se tasaantuu. Ajojen ~30–40 kohdalla paras arvo vakiintuu. Napsauta ”Save Best Config” – bayesopt-best.json tallennetaan esiasetuksen nimellä, ajon indeksillä, arvolla ja dekoodatuilla parametriarvoilla. Tämän JSON-tiedoston voit sitten manuaalisesti sisällyttää esiasetusmäärittelyysi.
W30Painike ”Start”
MISSÄ
Työkalupalkki vasemmalla, Idle/Finished-tilassa..
TEKNINEN
Nollaa ajoluettelon, siirtyy Running-tilaan, luo uuden ajo-ID:n (vanhentuneiden tietojen havaitsemiseksi useiden Start-napsautusten yhteydessä) ja luo uuden taukoportin. Sitten käynnistyy taustatehtävä, joka suorittaa optimoijan asynkronisena virtana. Alkunäytteiden koko määräytyy kaavalla min(8, budget / 4 + 1) – eli tyypillisesti 8 Latin-Hypercube-näytettä budjetilla ≥ 28, vähemmän pienellä budjetilla. Ajopäivitykset vastaanotetaan inkrementaalisesti ja liitetään luetteloon. Vanhentuneen ajon suojaus: jos toinen Start-napsautus asettaa ajo-ID:n uudelleen, vanhan ajon päivitykset hylätään.
Primary-action-tyyli antaa painikkeelle näkyvän ilmeen.
W31Painike ”Pause”
MISSÄ
Työkalupalkki vasemmalla, Running-tilassa..
TEKNINEN
Asettaa taukoportin aktiiviseksi ja siirtyy Paused-tilaan. Varsinainen vaikutus: suorittaja odottaa 50 ms:n kyselysilmukassa ennen seuraavan tavoitefunktion arviointia. Tämä tarkoittaa, että käynnissä oleva ajo suoritetaan loppuun (se on synteettinen ja kestää vain mikrosekunteja), mutta uutta ajoa ei aloiteta. Kun jatketaan, ajo jatkuu siitä, mihin se jäi.
W32Painike ”Stop”
MISSÄ
Työkalupalkki vasemmalla, Running- ja Paused-tilassa..
TEKNINEN
Keskeyttää suorittajatehtävän, nollaa viittauksen, vapauttaa taukoportin (jos se oli vielä tauolla) ja siirtyy Finished-tilaan (jos ajoja on) tai Idle-tilaan (jos ei ole). Jo lasketut ajot jäävät näkyviin luetteloon – Stop ei poista niitä. Tuhoava painikerooli näyttää painikkeen punaisena, koska se keskeyttää ajon.
W33Painike ”Resume”
MISSÄ
Työkalupalkki vasemmalla, Paused-tilassa..
TEKNINEN
Vapauttaa taukoportin ja siirtyy takaisin Running-tilaan. Suorittajatehtävä on jo käynnissä (se odottaa kyselysilmukassa); heti kun silmukka huomaa, että tauko on poistettu, se jatkaa ja aloittaa seuraavan ajon.
W34Painike ”Save Best Config”
MISSÄ
Työkalupalkki oikealla, aina näkyvissä (mutta pois käytöstä, jos bestTrialia ei ole)..
TEKNINEN
Avaa tallennusdialogin oletus- tiedostonimellä bayesopt-best.json, rajoitettu JSON-muotoon. Vahvistuksen jälkeen rakennetaan payload-sanakirja: esiasetuksen nimi, ajon indeksi, arvo (tavoitepisteet), parametrit (sanakirja dekoodatuista parametri- nimistä → arvoihin). Dekoodaus projisoi normalisoidut hakuavaruuden koordinaatit [0,1]^d takaisin alkuperäiseen arvoalueeseen (log-uniform/linear/integer-asteikkojen mukaisesti). JSON-ulostulo on kauniisti muotoiltu ja avaimet lajiteltu. Kirjoitusvirheen sattuessa (nykyisessä demoversiossa) se ohitetaan hiljaa – ei virhekäyttöliittymää, koska tämä on demopolku.
Painike pysyy harmaana, kunnes ajo on suoritettu.
W35Valitsin ”Search Space” -esiasetus
MISSÄ
Vasen sivupalkki, ylhäällä..
TEKNINEN
Valikkovalitsin neljällä esiasetusvaihtoehdolla: - ”RadianceKit defaults (6-dim)” – täydellinen standardihakuavaruus kaikilla Q7-hyperparametreilla. - ”Mip subset (2-dim)” – vain mipSmoothing3DScale [0.05, 0.5] log-uniform ja mipFilter2DVariance [0.1, 0.6] linear. Hyödyllinen, jos haluat virittää Mip-Splattingia tietylle sceneluokalle. - ”densify-until + ssim-weight + grad-thresh” – kolme Densify-relevanttia parametria (densifyGradThreshold log-uniform, ssimWeight linear, densifyUntilIter integer). - ”Bowl demo (1-dim)” – pedagoginen yhden parametrin hakuavaruus ”näin BayesOpt toimii” -demoja varten.
Ajon ollessa aktiivinen hakuavaruutta ei voi vaihtaa (sekoittaisi optimoijan).
W36Liukusäädin ”Trial Budget”
MISSÄ
Vasen sivupalkki, hakuavaruuden valitsimen alla..
TEKNINEN
Liukusäädin 10–200, askelväli 5. Oletus 40. Tämä tarkoittaa: BayesOpt saa tehdä enintään N ajoa. Näistä ensimmäiset ovat alkunäytteitä (Latin-Hypercube), loput ovat oikeita BayesOpt-ajoja. Nyrkkisäännöt käytännössä: hakuavaruus, jossa on d ulottuvuutta, tarvitsee noin 10d – 20d ajoa hyvän optimin saavuttamiseksi. 6-ulotteisilla oletuksilla siis 60–120, 2-ulotteisella Mip-osajoukolla 20–40, 1-ulotteisella Bowl-demolla 10–20.
Ajon aikana liukusäädin on pois käytöstä.
W37Liukusäädin ”Random Seed”
MISSÄ
Vasen sivupalkki, budjettiliukusäätimen alla..
TEKNINEN
Liukusäädin 1–100, askelväli 1. Oletus 42. Siemen välitetään sekä alkuperäisille Latin-Hypercube-näytteille että demo-objektiivin kohinakomponentille. Toistettavuus: sama siemen + sama hakuavaruus + sama budjetti tuottaa täsmälleen identtisen ajosekvenssin. Hyödyllinen, kun halutaan varmistaa, että ”saavatko kaikki kollegasi saman ajon, kun he toistavat demon?”. Ajon aikana pois käytöstä.
W38Kaavio (konvergenssi)
MISSÄ
Ikkunan keskisarake..
TEKNINEN
Swift Charts -kaavio kahdella kerroksella: 1. yksi viiva ”paras arvo tähän mennessä” per ajo – monotonisesti nouseva tai tasaisena pysyvä käyrä korostusvärillä. 2. yksi piste per ajo yksittäisellä tavoitearvolla, väritetty vaiheen mukaan. Symbolin koko 40. Kolme vaihe-etikettiä: ”init” (harmaa), ”bo” (sininen), ”restart” (oranssi).
Pieni selite näyttää vaihevärit ylhäällä vasemmalla. Jos ajo- luettelo on tyhjä (ennen ensimmäistä käynnistystä), näytetään sen sijaan tyhjän tilan ilmoitus kaaviokuvakkeella ja vihjeellä ”Press Start to begin a BayesOpt run.”
W39Taulukko (ajoloki)
MISSÄ
Ikkunan oikea sarake..
TEKNINEN
Vieritysalue, jossa on laiskasti pinottuja ajo- rivejä. Jokaisella rivillä on vaakasuuntainen pino: ajon numero (3-numeroinen monospaced, vasemmalla), arvo (monospaced, oikealle tasattu, 70 pt leveä), vaihe- tagi (kapseli, täytetty vaihevärillä 25 %:n peittävyydellä), valinnaisesti keltainen tähti, jos tämä ajo on tällä hetkellä paras. Automaattinen vieritysmekanismi hyppää automaattisesti loppuun, kun uusi ajo lisätään – jotta voit seurata live-edistymistä näytön alareunassa ilman, että sinun tarvitsee itse vierittää.
Pääikkuna: Häviön kehitys ja Gaussian-määrä (I39–I41, viittaus)
Kolme pääikkunan Tarkastajan näyttöä ansaitsevat oman selityksensä, koska ne ovat jatkuvasti näkyvissä käynnissä olevan koulutuksen aikana ja on olemassa tärkeitä nyrkkisääntöjä sille, milloin kehitys näyttää terveeltä. Nämä näytöt sijaitsevat Tarkastajassa ”Loss Chart” -osion alla (katso Luku 2 – Tarkastaja) ja täydentävät Holdout-analyysia yllä olevasta apuikkunasta.
Milloin häviökäyrä on terve? Terve häviökäyrä näyttää kolme vaihetta: (1) Lämmittely – ensimmäisten 200–500 iteraation aikana häviö putoaa jyrkästi korkealta (tyypillisesti 0.15–0.25 L1+SSIM-yhdistelmälle scenestä riippuen) noin puoleen. Jos häviö EI putoa tässä vaiheessa, syöte on yleensä väärä (kuvat rikki, SfM-poset huonot, alku-Gaussianien määrä liian pieni). (2) Tiivistys – noin 500 ja densifyUntilIteration (klassisesti 15K, MCMC jopa 20K tai 25K) välillä häviö jatkaa putoamistaan, usein pienin hyppäyksin alaspäin, kun tiivistysoperaatiot lisäävät uusia Gaussianeja ja optimoija hyödyntää niitä. Gaussian-määrä kasvaa tässä vaiheessa. (3) Hienosäätö – sen jälkeen häviö siirtyy loivempaan häntään. Tyypilliset loppuarvot: Tanks-&-Temples Truck P4 Qualitylla päätyy L1 ≈ 0.023, Horse Full Classic V546:lla L1 ≈ 0.0230, ulko-Mip-NeRF360-scenet usein huonommin (0.04–0.07).
Mitä tasanko tarkoittaa? Tasanko (häviökäyrä kulkee vaakasuoraan useiden tuhansien iteraatioiden ajan) voi tarkoittaa kahta asiaa: (a) malli on konvergoitunut, lisäkoulutus ei tuo enää hyötyä – tämä on hyvä tapaus. (b) malli on jumissa (paikallinen minimi, huono gradienttitieto, puskurirajan ylitys) – huono tapaus. Molemmat näyttävät kaaviossa identtisiltä. Erottelu: katso Gaussian-määrää. Jos sekin on tasainen JA lähellä MCMC-rajaa (esim. 150K / 150K .fullMCMC:llä), olet rajalla – joko nosta rajaa tai hyväksy tasanko. Jos Gaussian-määrä vielä kasvaa, mutta häviö ei putoa, se on jumissa.
Milloin keskeyttää vs. jatkaa koulutusta? Nyrkkisääntö: 10K iteraatiota ilman minimihäviön parannusta → keskeytä, lisäiteraatiot ovat hukkaan heitettyjä. Sitä ennen: voit lisätä jatkoaikaa Cmd+T:llä (Training-valikko → Continue Training → +5K iterations), jos näet rajallista parannusta. Huomio: MCMC:llä tasanko on usein todellinen – raja on luonnollinen raja.
Gaussian-määrän tasanko EI OLE ”valmis”-signaali. Se tarkoittaa vain, että MCMC on saavuttanut rajansa tai että klassinen tiivistys on käytetty loppuun. Todellisen ”valmis”-kysymyksen esittää vasta Holdout-analyysi – PSNR/SSIM/LPIPS riippumattomalla testijoukolla, arvioituna Holdout-ikkunassa (W23–W29) tai –benchmark-lipulla.
PSNR/Holdout on totuus, häviö vain välityspalvelin. Häviö on suhteellinen metriikka: se putoaa, kun mallisi sopeutuu koulutusnäkymiin. Matala häviö ei kuitenkaan automaattisesti tarkoita hyvää mallia – jos malli on oppinut koulutuskuvat ulkoa (ylioppiminen), häviö olisi pieni, mutta PSNR näkemättömissä näkymissä (holdout) olisi huono. Siksi: lopullisessa laadunarvioinnissa katso aina holdout-metriikoita, ei pelkästään loppuhäviötä.
Nyrkkisääntölaatikko
- User Guide ja Pikanäppäimet ovat staattisia ohjeita – nopeita hakusanakysymyksiin, syvempää tietoa varten käytä tätä käyttöopasta. - Avaa Tallennustilan hallinta, kun levytilaa on alle 10 % vapaana. Lokit ja Imports-väliaikaistallennus ovat yleisimmät syylliset. - Pareto-koontinäyttö on hyödyllinen vasta vähintään kolmen tai neljän koulutusraportin jälkeen. X-akseli = kustannukset (aika / Gs), Y-akseli = laatu (PSNR / SSIM). Pareto-rintama näyttää tehokkaat yhdistelmät. - Käytä Holdout-analyysia ennen kuin julkaiset PSNR-vertailuja muiden kanssa – se varmistaa, että testijoukkosi on todella edustava. - BayesOpt-konsoli on ensisijaisesti oppimis- ja tarkastelutyökalu hakuavaruuden määrittelyille. Oikeisiin koulutuspohjaisiin hyperparametrien virityksiin käytä offline-CLI-työnkulkua. - Häviön tasanko ja Gaussian-määrän tasanko on tulkittava erikseen. Rajan saavuttaminen ei ole ”valmis”-signaali. Todellisen laadun mittaa vain holdout-PSNR. - 10K iteraatiota ilman minimihäviön parannusta → pysäytä koulutus.