Bölüm 9 — SfM Arka Uçları
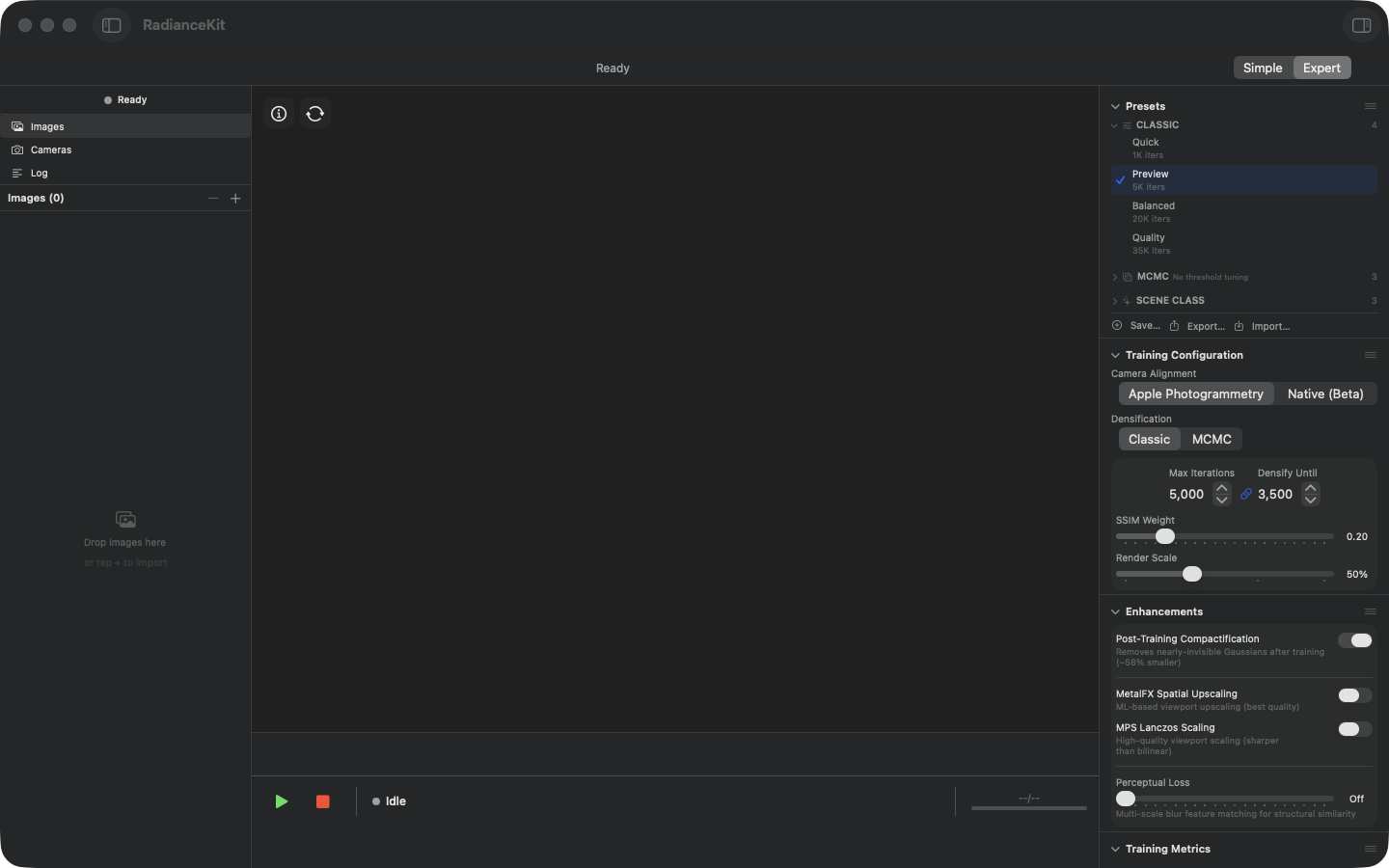

Inspector'daki Camera Alignment seçici iki seçeneği olan bir segmented control'dür — Apple Photogrammetry (App Store yapımları için varsayılan, tam sandbox uyumlu) ve Native (Beta) (RadianceKit'in kendi FAST+BRIEF+GLOMAP-pipeline arka ucu, Faz 3.8/3.9 sırasında geliştirildi, 2026-05 durumu). Native (Beta) yalnızca orbit modunda doğrulanmıştır ve ≥1 000 kare için Apple Photogrammetry'den daha hızlıdır, ancak henüz Faz-3 §5 kalite kapısını (finalLoss ≤ 0.0115) karşılamaz — bu yüzden Beta etiketi var. Metashape, COLMAP veya başka bir fotogrametri yazılımından gelen harici SfM sonuçları ayrıca File menüsünden içe aktarılabilir (Q3 COLMAP metin biçimi, Q6 Workspace içe aktarma) — seçici değişmez, ama içe aktarılan pozlar SfM sonucunun yerini alır.
SfM, Structure from Motion anlamına gelir. Bir dizi örtüşen fotoğraftan yola çıkarak yazılım, her görüntü için kameranın ortak bir 3B koordinat sisteminde konumunu ve bakış yönünü yeniden yapılandırır. Bu süreçte, Gaussian Splatting eğitimini başlatan kabaca bir 3B nokta bulutu üretilir. SfM sonucu, asıl eğitimin girdisidir ve sonraki görüntü kalitesini belirleyici biçimde etkiler.
RadianceKit beş SfM yolu sunar: uygulamaya yerleşik iki arka uç (Q1 Apple Photogrammetry, Q4/Q5 Native), harici araçlardan iki içe aktarma yolu (Q3 COLMAP metin biçimi, Q6 ikili Workspace içe aktarma) ve yalnızca App Store dışındaki geliştirici yapılarında kullanılabilen Q2 COLMAP ikili. Hangisinin doğru olduğu, sahne tipine (nesne etrafında orbit, iç mekân, dron uçuşu) ve harici bir yazılımın halihazırda yeniden yapılandırma sunup sunmadığına bağlıdır.
Q1 — Apple Photogrammetry
NEREDE
Expert View → Inspector → Eğitim yapılandırması → Camera Alignment seçici, „Apple Photogrammetry" girdisi.
TEKNİK
Apple'ın aslen Object Capture için geliştirdiği yerleşik fotogrametri çatısını sarar. Apple içeride özel bir pipeline ile özellikleri çıkarır (adımlar kamuya açık biçimde belgelenmemiştir), bunları çok görünümlü eşleştirmeyle doğrular ve bundle adjustment'i Apple Silicon Neural Engine + GPU üzerinde çözer. Arka uç tamamen App Store uyumludur (harici ikili yok, Sandbox=true, cihaz üzerinde), ama yalnızca kamera pozlarını ve kabaca bir nokta bulutu sağlar — track uzunluğu ya da yeniden projeksiyon hatası gibi tanı metrikleri yoktur. Apple'ın önerisine göre birkaç yüz görüntüye kadar ölçeklenir. Doğrusal dron uçuşlarında veya büyük dış mekân sahnelerinde ~500 kareden fazla olduğunda yeniden üretilebilir çökmeler veya tekil kameraların sessizce atılması gözlenmiştir.
Q3 — COLMAP Metin Biçimi (Metashape / ETH3D)
NEREDE
„File → Import COLMAP / Metashape Workspace…" (Cmd+⇧+I) menüsü VEYA sparse/0/cameras.txt içeren bir klasörü sürükle bırak.
TEKNİK
Standartlaştırılmış COLMAP metin dışa aktarmasını okur — sparse/0/ alt klasöründeki üç metin dosyası cameras.txt, images.txt, points3D.txt — ve dahili SfM sonucu modeline dönüştürür. COLMAP ikili dışa aktarmasıyla aynı biçim tanımı, sadece ikili yerine ASCII. Agisoft Metashape, RealityCapture, PolyCam ve ETH3D benchmark'ı tam olarak bu düzende dışa aktarır. Ayrıştırıcı, kamera modeli tanımayı ikili ayrıştırıcıyla paylaşır (tüm yaygın modeller: SIMPLE_PINHOLE, PINHOLE, OPENCV, OPENCV_FISHEYE, FULL_OPENCV). Yorum satırlarına ve boş satırlara karşı dayanıklıdır. Testlerde ~1 400 kameraya kadar (ETH3D Tunnel) sorunsuz ölçeklenir.
Q4 — Native SfM (artımlı)
NEREDE
Expert View → Inspector → Eğitim yapılandırması → Camera Alignment seçici, „Native (Beta)" girdisi. Artımlı bu arka ucun varsayılan modudur — Inspector'da ayrı bir mapper seçici yoktur. CLI üzerinden mod açıkça –native-sfm veya –sfm-mapper incremental ile ayarlanabilir.
TEKNİK
Tüm SfM pipeline'ının kendi GPU hızlandırmalı uygulaması: FAST+BRIEF özellikleri YA DA CoreML üzerinden SuperPoint+LightGlue (–coreml-features ile), ardından Hamming-KNN eşleştirme, RANSAC temel matrisi, track oluşturma, başlangıç çifti seçimi, iki görünümlü bootstrap (F→E artı DLT), PnP kaydı ve çok görünümlü üçgenleme ile açgözlü artımlı mapper ve Huber kaybı ile Schur-indirgenmiş Levenberg-Marquardt ve Cholesky çözümü üzerinden analitik Jacobian'lar ile son bundle adjustment. Tamamen App Store uyumlu: harici ikili yok, Sandbox=true. Faz 3.10'da gönderilen R2 çökme dedektörü ile: uygulama girdi karelerinin %60'ından azını kaydederse veya kamera başına nokta oranı 13'ün altına düşerse, otomatik olarak global mapper'a (Q5) geçilir. Orbit/turntable sahnelerinde ampirik olarak temiz; daha genel hareketlerde (dron uçuşu, karmaşık geometrili iç mekânlar) başarı oranı daha düşüktür — ama dedektör bu durumları yakalar. Güvenilir biçimde ~200 kameraya kadar ölçeklenir, daha fazlası belirgin biçimde daha uzun çalışma süresiyle olur.
Q5 — Native SfM (global)
NEREDE
Artımlı mapper (Q4) çökme dedektörünü tetiklediğinde (girdi karelerinin %60'ından azı kaydedildi veya kamera başına nokta oranı 13'ün altında) otomatik olarak çağrılır. Yalnızca CLI ile –sfm-mapper global üzerinden zorla başlatılabilir. Inspector'da global yöntem ayrı bir seçici aracılığıyla erişilebilir değildir — uygulama ne zaman geçeceğine kendi karar verir.
TEKNİK
Yerel pipeline'ın global varyantı. Önce Q4 gibi özellik çıkarma + eşleştirme, ardından tüm doğrulanmış çiftler için göreli poz tahmini, ardından rotation averaging (tüm kamera dönüşlerini dünya koordinat sisteminde senkronize eder) ve translation averaging (büyük kamera sayılarında tamsayı taşmasını önlemek için matrissiz seyrek bir formülasyon üzerinde LSQR tabanlı). Prensipte ~5 000 kameraya kadar ölçeklenir, pratikte birkaç yüz kameranın üzerinde kalite düşer — K-1351'de Faz 3.8 §5 kabul kapısı ölçümü, hedeflenen 0.0115 yerine finalLoss 0.07 verdi. „Fallback tier" olarak ele alınır: artımlı mapper bozulduğunda devreye girer, ama kendisi tekrar kalite açısından kontrol edilmez.
Q6 — Metashape / COLMAP-Metin Workspace İçe Aktarma (Faz Q7)
NEREDE
File menüsü → „Import COLMAP / Metashape Workspace…" (Cmd+⇧+I). sparse/0/cameras.{bin,txt} ve images/ içeren bir klasörü sürükle bırak.
TEKNİK
Sürükle-bırak veya Open Panel ile seçilen bir klasörün üç COLMAP workspace düzeninden birine (sparse/0/, sparse/ veya kök) uyup uymadığını ve yeniden yapılandırmanın ikili (cameras.bin) mı metin (cameras.txt) mi olduğunu otomatik algılar. İkili yol COLMAP ikili ayrıştırıcısını, metin yolu ETH3D yükleyicisini kullanır — her ikisi de aynı SfM sonucu modelini üretir ve pipeline'ın geri kalanı (görüntüleri içe aktarma, MCMC eğitimini başlatma) kaynağa karşı agnostiktir. Görüntüler uygulama sandbox bookmark sistemi üzerinden güvenlik kapsamlı (security-scoped) açılır, böylece içe aktarma App Store sürümünde de çalışır. Özellikle „Metashape dışa aktarmayı yeniden yapılandırmayı yeniden hesaplamadan kullan" durumu için tasarlanmıştır. File menüsü girdisinde bahsedilen tanıma, seçilen klasör tanınabilir bir workspace değilse uygulama günlüğünde uyarır.
Hangi arka uç ne zaman?
| Senaryo | Önerilen arka uç |
|---|---|
| Nesne taraması, 50–200 fotoğraf | Q1 Apple Photogrammetry |
| Büyük dış mekân / dron / >500 görüntü | Q6 Workspace içe aktarma (Metashape veya COLMAP'te hesapla, sonra yükle) |
| Metashape/RealityCapture dışa aktarması mevcut | Q6 İçe aktarma (SfM gerekmez) |
| ETH3D / akademik COLMAP metin seti | Q3 COLMAP metin içe aktarma |
| Sıkı App Store uyumlu + orbit sahne | Q4 Native artımlı |
| Q4 başarısız oluyor | Q5 Native global (otomatik) |
| ETH3D benchmark verileri | Q3 (autotest precomputed) |
Hızlı karşılaştırma
| Arka uç | App Store | Sandbox | Harici ikili | En iyi kullanım | Maks ~cam |
|---|---|---|---|---|---|
| Q1 Apple PG | ✅ | ✅ | — | Orbit-Nesne | ~300 |
| Q2 COLMAP İkili | ❌ (sadece geliştirici yapı) | — | colmap/glomap | Büyük dış mekân | ~5 000 |
| Q3 COLMAP-Metin içe aktarma | ✅ | ✅ | — | Bench rig | ~1 500 |
| Q4 Native artımlı | ✅ | ✅ | — | Orbit-Nesne | ~200 |
| Q5 Native global | ✅ | ✅ | — | Q4 fallback | ~1 351 |
| Q6 Workspace içe aktarma | ✅ | ✅ | — | Metashape yeniden kullanımı | kaynağa göre |